



Jan Zaaijer
Team Leader Seakeeping and Manoeuvring

Captive manoeuvring tests in the Seakeeping and Manoeuvring Basin.
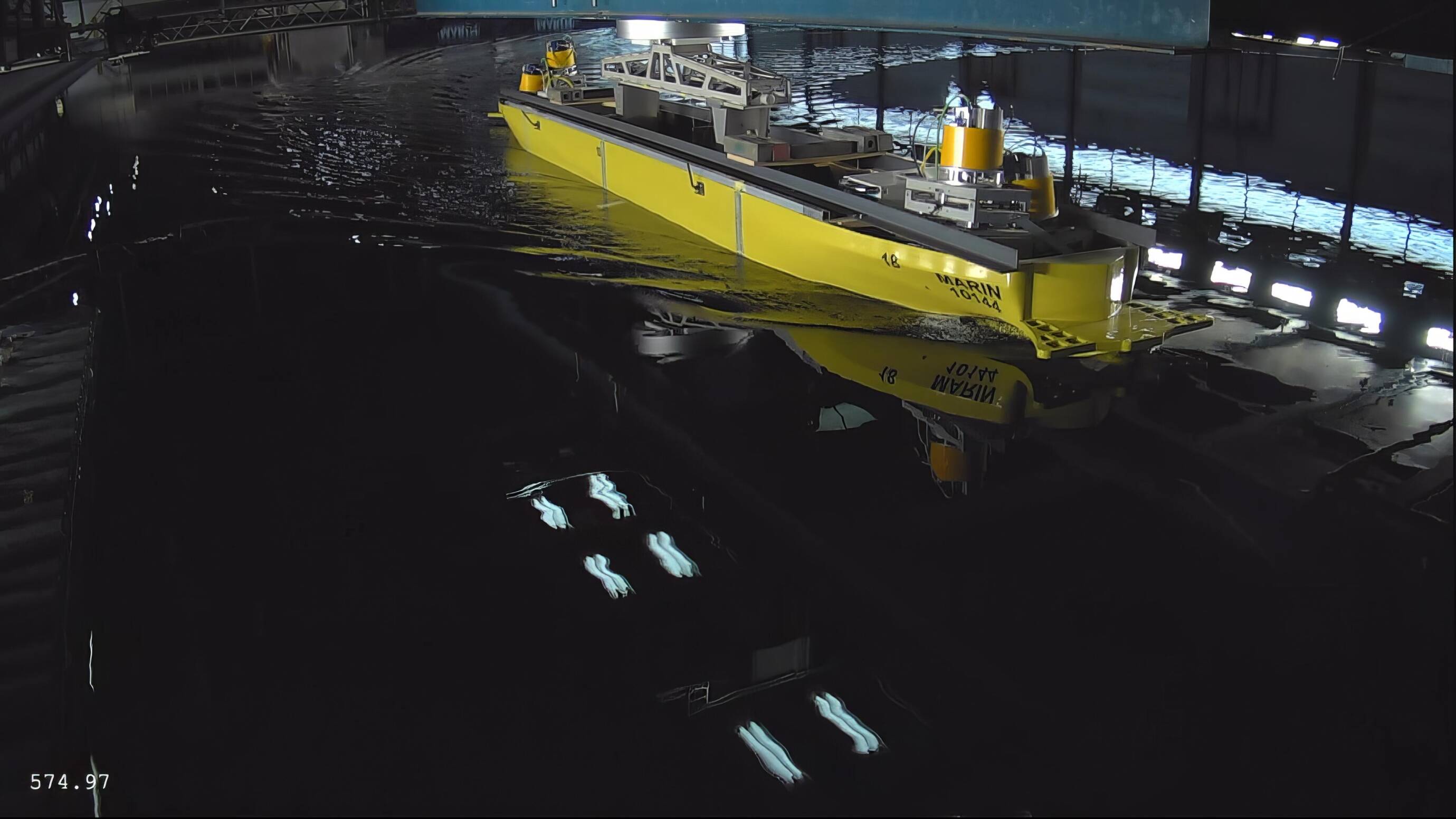
Crabbing model tests in the Shallow Water Basin.

January 2026, no. 146
Create a MARIN account to stay updated

Report
Captive manoeuvring model tests provide best quality data for new symmetrical ferry design
Due to the P&O Pioneer class ferry being much larger compared to other ships sailing the same route, and the unusual propulsion and steering configuration, MARIN paid particular attention to handling in the two ports.
Deriving a high-fidelity simulation model
Following these dedicated model tests, MARIN analysed the results to create a high-fidelity simulation model. Unlike traditional approaches based on generic coefficients, such a model was fully tailored to the P&O Pioneer class ferry. It was based on the experimental results obtained with the actual geometry of the ship. As such, it included an accurate description of the hull and its appendages using MARIN’s expertise and cutting-edge technology.
At MARIN, physical-based models are the result of years of investigation and experience. They are in continuous evolution, to combine realism and accuracy. Each part of the model is given a clear physical meaning, so that the simulation reproduces the real ship behaviour as accurately as possible. This involves a deep understanding of the experimental data, but also of the physical phenomena that occur when a ship is sailing.
Captive experiments provide the best quality data for simulation models and are free from numerical approximations. The final model was extensively validated against the experimental results to ensure the best accuracy.
Captive manoeuvring model tests provided manoeuvring loads on the hull and appendages at speed. In addition to that, crabbing model tests were conducted in the Shallow Water Basin to quantify pod-hull and pod-pod interactions in harbour conditions. This means that the tests were conducted at zero speed, for a large combination of pod angles and propeller revolution rates, in deep and shallow water. The Shallow Water Basin, which measures 220m x 15.8m, can be filled and emptied to adjust the water level between 0m and 1.1m. Results of these zero-speed tests are important for the accurate representation of the pod behaviour in the simulation model. In particular, generic coefficients for single-ended ships would not apply in the case of this double-ended ferry because of the unusual shape of the ship ends.
Conducting such dedicated experiments is a true team effort, involving careful preparation and instrumentation of the ship model in MARIN’s workshop. The test matrix is designed to provide sufficient information to derive a simulation model. Once the model is in the basin, the quality of the raw test results is immediately verified. This data is then analysed and combined into readable and meaningful tables and plots.
Seakeeping and Manoeuvring Basin tests
Captive manoeuvring model tests designate the measurement of a ship’s hydrodynamic loads under a broad range of imposed motions in a fully controlled environment. The scale model of the ferry was fixed to the moving carriage of MARIN’s Seakeeping and Manoeuvring Basin, which imposed predefined motions and actuator controls. While the carriage pulled the ship model along a given track, the manoeuvring loads applied to the ship and its actuators were recorded. To capture these loads, the ship model was heavily instrumented. It featured more than 40 force transducers, a number of potentiometers, servo and electrical motors.
The flexibility and size of the Seakeeping and Manoeuvring Basin, (170m x 40m), enabled a wide variety of imposed motions, actuator controls and sailing conditions. Thanks to a computerised planar motion carriage (CPMC), any planar motion can be prescribed to the ship model. Load-variation tests, tests under drift and/or yaw motion, pod sweeps under straight, drift and rotation motion, and oscillation tests are all typical types of tests conducted in a captive manoeuvring basin programme. The figure represents an example of a track imposed by the carriage, towing the ship through the basin at a constant speed and drift angle, with a yaw rate constantly varying from one given value to another.
To investigate this, MARIN combined the best of experimental and numerical worlds by performing captive manoeuvring experiments to derive high-fidelity simulation models, which are used to carry out manoeuvring predictions and simulator training for the captains (see the following article). This approach improves design insights, increases training quality and minimises operational risks.
Numerous teams within MARIN worked together on a single physical and numerical model to provide answers to the client. A wide range of dedicated experiments were conducted in the first part of the manoeuvring study to gather sufficient input for the mathematical model. To tackle the hull, as well as the pods and their interactions in deep and shallow water, dynamic captive manoeuvring model tests and crabbing model tests were carried out.
Example of track prescribed by the carriage, towing the ship model through the basin to measure hydrodynamic loads under various conditions.
Interested? Contact us to discuss your options
Alexander Siteur
Specialist Maritime Operations

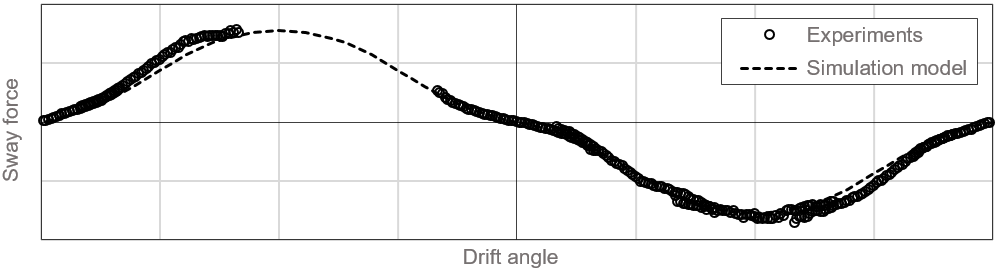
The mathematical model is fitted to the experimental data, describing the hydrodynamic loads by means of coefficients.




Captive manoeuvring tests in the Seakeeping and Manoeuvring Basin.
Jan Zaaijer
Team Leader Seakeeping and Manoeuvring

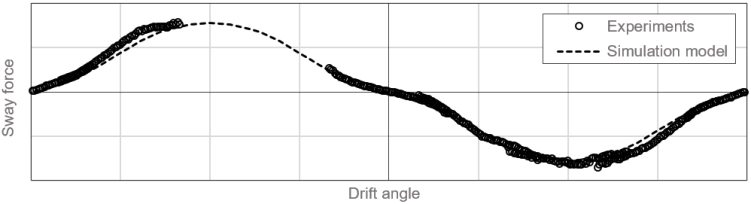
The mathematical model is fitted to the experimental data, describing the hydrodynamic loads by means of coefficients.
Example of track prescribed by the carriage, towing the ship model through the basin to measure hydrodynamic loads under various conditions.
Deriving a high-fidelity simulation model
Following these dedicated model tests, MARIN analysed the results to create a high-fidelity simulation model. Unlike traditional approaches based on generic coefficients, such a model was fully tailored to the P&O Pioneer class ferry. It was based on the experimental results obtained with the actual geometry of the ship. As such, it included an accurate description of the hull and its appendages using MARIN’s expertise and cutting-edge technology.
At MARIN, physical-based models are the result of years of investigation and experience. They are in continuous evolution, to combine realism and accuracy. Each part of the model is given a clear physical meaning, so that the simulation reproduces the real ship behaviour as accurately as possible. This involves a deep understanding of the experimental data, but also of the physical phenomena that occur when a ship is sailing.
Captive experiments provide the best quality data for simulation models and are free from numerical approximations. The final model was extensively validated against the experimental results to ensure the best accuracy.
January 2026, no. 146
Alexander Siteur
Specialist Maritime Operations

Crabbing model tests in the Shallow Water Basin.

Captive manoeuvring model tests provided manoeuvring loads on the hull and appendages at speed. In addition to that, crabbing model tests were conducted in the Shallow Water Basin to quantify pod-hull and pod-pod interactions in harbour conditions. This means that the tests were conducted at zero speed, for a large combination of pod angles and propeller revolution rates, in deep and shallow water. The Shallow Water Basin, which measures 220m x 15.8m, can be filled and emptied to adjust the water level between 0m and 1.1m. Results of these zero-speed tests are important for the accurate representation of the pod behaviour in the simulation model. In particular, generic coefficients for single-ended ships would not apply in the case of this double-ended ferry because of the unusual shape of the ship ends.
Conducting such dedicated experiments is a true team effort, involving careful preparation and instrumentation of the ship model in MARIN’s workshop. The test matrix is designed to provide sufficient information to derive a simulation model. Once the model is in the basin, the quality of the raw test results is immediately verified. This data is then analysed and combined into readable and meaningful tables and plots.
Seakeeping and Manoeuvring Basin tests
Captive manoeuvring model tests designate the measurement of a ship’s hydrodynamic loads under a broad range of imposed motions in a fully controlled environment. The scale model of the ferry was fixed to the moving carriage of MARIN’s Seakeeping and Manoeuvring Basin, which imposed predefined motions and actuator controls. While the carriage pulled the ship model along a given track, the manoeuvring loads applied to the ship and its actuators were recorded. To capture these loads, the ship model was heavily instrumented. It featured more than 40 force transducers, a number of potentiometers, servo and electrical motors.
The flexibility and size of the Seakeeping and Manoeuvring Basin, (170m x 40m), enabled a wide variety of imposed motions, actuator controls and sailing conditions. Thanks to a computerised planar motion carriage (CPMC), any planar motion can be prescribed to the ship model. Load-variation tests, tests under drift and/or yaw motion, pod sweeps under straight, drift and rotation motion, and oscillation tests are all typical types of tests conducted in a captive manoeuvring basin programme. The figure represents an example of a track imposed by the carriage, towing the ship through the basin at a constant speed and drift angle, with a yaw rate constantly varying from one given value to another.
To investigate this, MARIN combined the best of experimental and numerical worlds by performing captive manoeuvring experiments to derive high-fidelity simulation models, which are used to carry out manoeuvring predictions and simulator training for the captains (see the following article). This approach improves design insights, increases training quality and minimises operational risks.
Numerous teams within MARIN worked together on a single physical and numerical model to provide answers to the client. A wide range of dedicated experiments were conducted in the first part of the manoeuvring study to gather sufficient input for the mathematical model. To tackle the hull, as well as the pods and their interactions in deep and shallow water, dynamic captive manoeuvring model tests and crabbing model tests were carried out.
Due to the P&O Pioneer class ferry being much larger compared to other ships sailing the same route, and the unusual propulsion and steering configuration, MARIN paid particular attention to handling in the two ports.
Captive manoeuvring model tests provide best quality data for new symmetrical ferry design
Interested? Contact us to discuss your options
Create a MARIN account to stay updated

Report



