



April 2023, no. 135

Create a MARIN account to stay updated
Report
MARIN has designed and built the modular Autonomous Underwater Vehicle (mAUV) for use in research projects in its model basins. The mAUV has a modular set-up, so that future modifications can be made without the need to construct a new vehicle each time.
In 2022, we took the next important step in its development with the addition of relative navigation capabilities. This enables accurate manoeuvring in the vicinity of objects, which is essential during launch and recovery operations for example. We implemented a method for measuring the position and attitude of the vehicle relative to a known target. Furthermore, control system developments are necessary to allow transitions between absolute (earth-fixed) position control and relative (target-fixed) position control.
Relative position measurement
During the year we focused on the design of the hardware and software for the relative navigation sensor. The hardware consists of a camera inside a watertight casing, attached at the front of the mAUV and the software processes the camera images in three steps: (1) detection of passive markers (ArUco tags), (2) vehicle position and attitude estimation, relative to the launch and recovery cage
The first two steps had already been demonstrated in a previous prototype. However, underwater use required several additional steps. The camera had to be placed in a watertight housing, which was designed and built in-house, and dedicated illuminated ArUco tags were also manufactured. Lighting is essential to ensure the correct detection of the tags, especially when placed deep down at the bottom of our model basin. Several lighting options were investigated, and a back-lit design (similar to illuminated signage) provides the best results.
Time-domain simulation model
Relative position control was added to the existing vehicle control system. This allows the vehicle to use both absolute (earth-fixed) and relative (target-fixed) position measurements as input. Furthermore, we implemented the transitions between absolute and relative control. Smooth transitions are essential to avoid any undesired vehicle motions while approaching a target. The control algorithms were developed and tested using a digital twin of the mAUV.
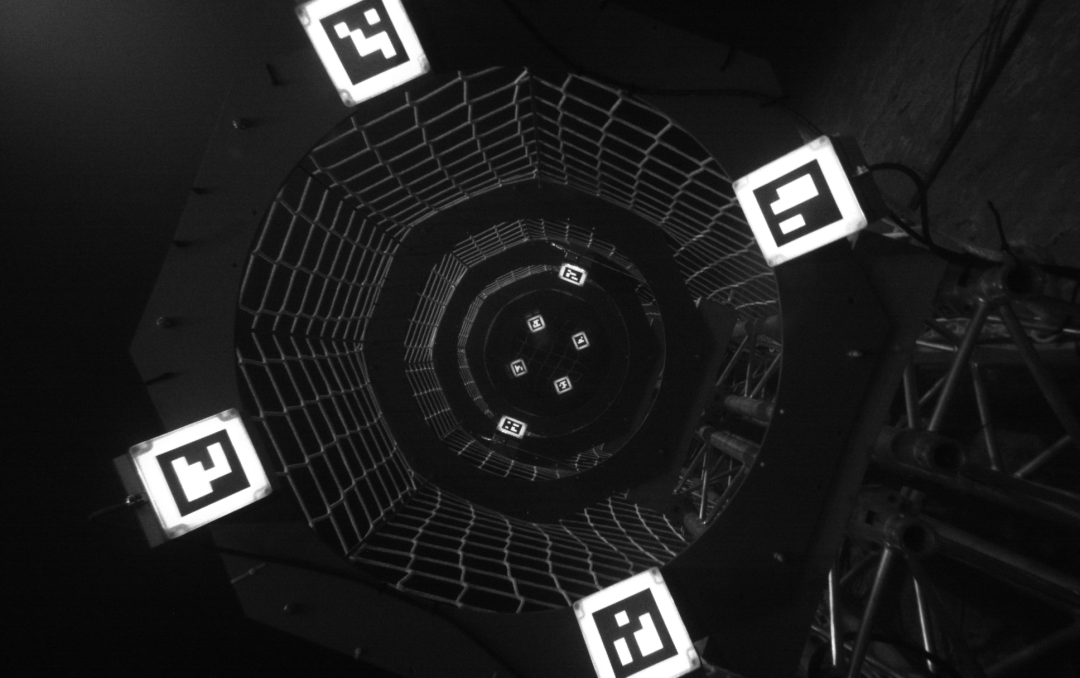
Relative position measurements using an onboard camera (below) and passive markers (above).

Future developments
Our research on autonomous underwater vehicles does not end here, and we have identified several areas to explore. For example, we would like to increase the forward speed of the vehicle to improve its operating envelope. We are also keen to further develop the autonomous capabilities and increase the complexity of mAUV’s missions. And finally, the results of the present launch and recovery experiments inspired us to further enhance the performance of the relative position measurement system. Additionally, we believe there are a lot of possibilities for other applications of the relative position measurement system, both underwater and above water.
The mAUV on a mission to search and inspect a sea mine! Its manoeuvres around the mine is a demonstration of the six Degrees of Freedom control capabilities of the vessel.
More info:
MARIN develops modular Autonomous
Underwater Vehicle

Design of an underwater vehicle for use in basin experiments, development of MARIN's Modular AUV

Hans Cozijn
Senior Project Manager






Design of an underwater vehicle for use in basin experiments, development of MARIN's Modular AUV
MARIN develops modular Autonomous
Underwater Vehicle
April 2023, no. 135
Hans Cozijn
Senior Project Manager
More info:
The mAUV on a mission to search and inspect a sea mine! Its manoeuvres around the mine is a demonstration of the six Degrees of Freedom control capabilities of the vessel.
Future developments
Our research on autonomous underwater vehicles does not end here, and we have identified several areas to explore. For example, we would like to increase the forward speed of the vehicle to improve its operating envelope. We are also keen to further develop the autonomous capabilities and increase the complexity of mAUV’s missions. And finally, the results of the present launch and recovery experiments inspired us to further enhance the performance of the relative position measurement system. Additionally, we believe there are a lot of possibilities for other applications of the relative position measurement system, both underwater and above water.

The first two steps had already been demonstrated in a previous prototype. However, underwater use required several additional steps. The camera had to be placed in a watertight housing, which was designed and built in-house, and dedicated illuminated ArUco tags were also manufactured. Lighting is essential to ensure the correct detection of the tags, especially when placed deep down at the bottom of our model basin. Several lighting options were investigated, and a back-lit design (similar to illuminated signage) provides the best results.
Time-domain simulation model
Relative position control was added to the existing vehicle control system. This allows the vehicle to use both absolute (earth-fixed) and relative (target-fixed) position measurements as input. Furthermore, we implemented the transitions between absolute and relative control. Smooth transitions are essential to avoid any undesired vehicle motions while approaching a target. The control algorithms were developed and tested using a digital twin of the mAUV.
Relative position measurements using an onboard camera (below) and passive markers (above).

In 2022, we took the next important step in its development with the addition of relative navigation capabilities. This enables accurate manoeuvring in the vicinity of objects, which is essential during launch and recovery operations for example. We implemented a method for measuring the position and attitude of the vehicle relative to a known target. Furthermore, control system developments are necessary to allow transitions between absolute (earth-fixed) position control and relative (target-fixed) position control.
Relative position measurement
During the year we focused on the design of the hardware and software for the relative navigation sensor. The hardware consists of a camera inside a watertight casing, attached at the front of the mAUV and the software processes the camera images in three steps: (1) detection of passive markers (ArUco tags), (2) vehicle position and attitude estimation, relative to the launch and recovery cage
MARIN has designed and built the modular Autonomous Underwater Vehicle (mAUV) for use in research projects in its model basins. The mAUV has a modular set-up, so that future modifications can be made without the need to construct a new vehicle each time.
Report