linkedin.com/company/cooperative-research-ships


https://crships.org
Interested? Contact us to discuss your options
June 2025, no. 144
Create a MARIN account to stay updated

Report
CRS – 55 years old and still flourishing!, MARIN Report magazine 143
More info
Figure 3: The two setups: soft mooring (top) with two forward springs attached to the hull; semi-captive (bottom) with a carbon double pantograph attached to a rolling plate inside the hull.
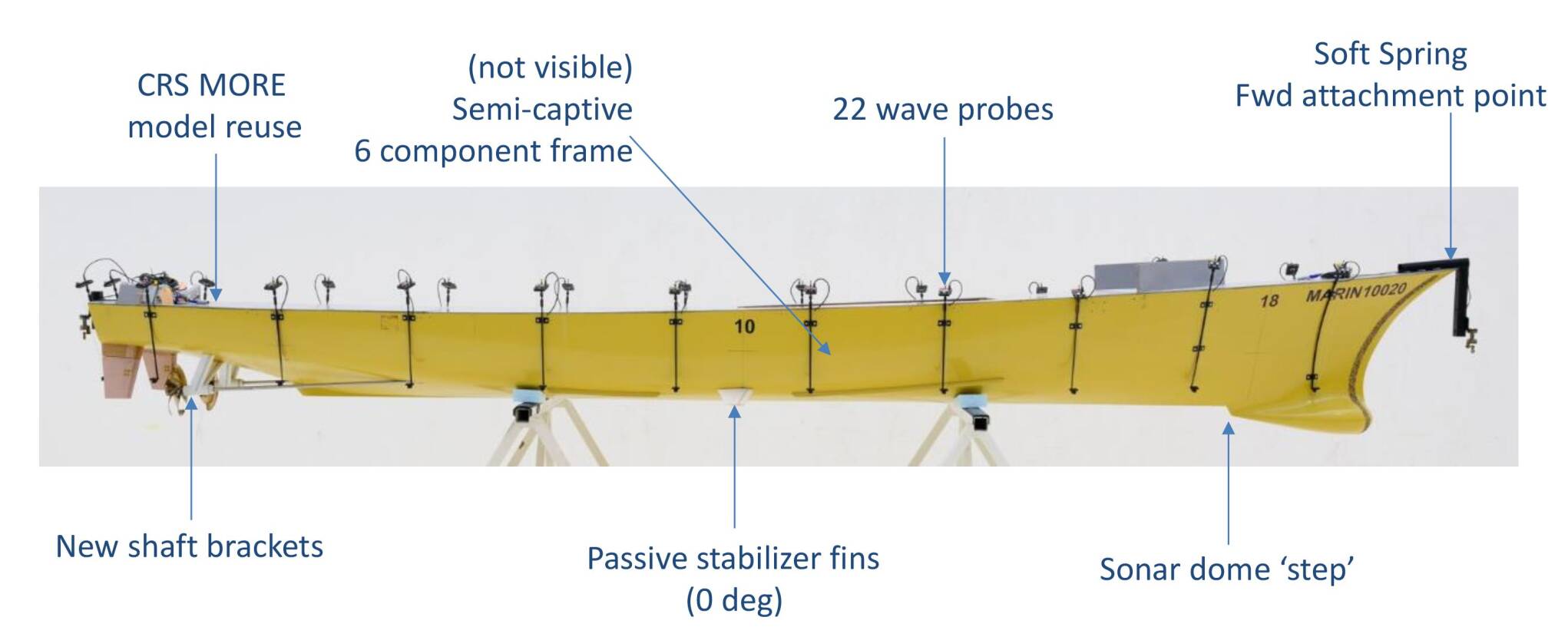
Figure 2: Overview of the model and various sensors.

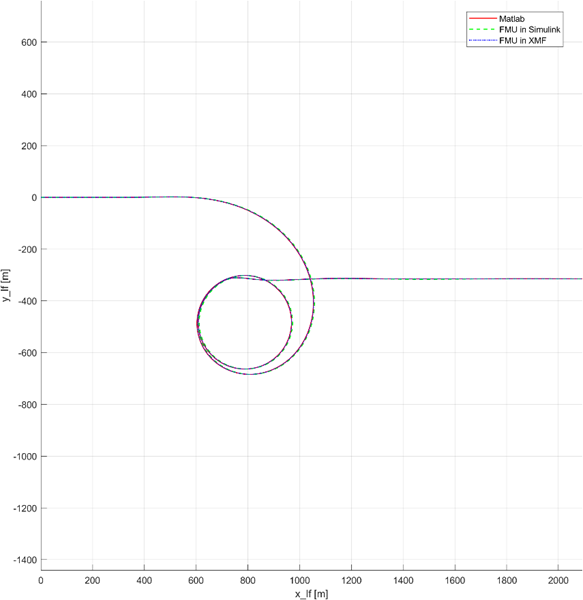
Figure 1: Turning circle - comparison of tracks obtained with MANWAV-MATLAB and MANWAV-FMU in Simulink and MARIN’s XMF simulation environments.
A pilot project on co-simulation demonstrated that the Functional Mock-up Interface/Unit (FMI/FMU) standard provides a way out: MAMBO has adopted this approach by redesigning MANWAV as a plant-controller system, separating the vessel-propeller-rudder dynamics from the manoeuvre controls. The restructured MATLAB functions were ‘wrapped’ into Simulink models, which were converted into FMUs.
Members with access to an FMU-compliant simulation platform (such as Simulink or MARIN’s XMF) can now draw from this FMU set or use the integrated MANWAV-FMU vessel dynamics model. A demonstration of the consistency of the results between the starting MATLAB code and the newly developed Simulink models and FMUs is given in Figure 1.
As part of any assessment, time domain simulations are done to compute the ship motions during typical manoeuvres (such as heading keeping, turning circles, zigzags) in calm water and in waves.
The CRS MAMBO project aims to (re-)develop and validate the MANoeuvring in WAVes (MANWAV) software program, with a focus on software maintainability and sharing across simulation platforms, and the validation of wave drift forces by conducting dedicated model-scale experiments.
CRS MAMBO – Validated simulation tool for manoeuvring & seakeeping optimisation
Requirements regarding minimum power, safe return to port, and navy recommendations, compel naval architects to assess the performance of ships sailing in harsh weather conditions or with limited propulsion and steering.


Understanding hydrodynamic loads
For validation of the Quadratic Transfer Functions of SEACAL, model tests[1] were carried out with the 5415M model with a soft spring setup and a semi-captive setup, as shown in Figures 2 and 3. These setups made it possible to measure wave drift forces in 6 Degrees of Freedom (DoF) in regular, biochromatic and irregular waves. This differs from most data available in literature: historically, model tests focused only on added resistance (so only in 1 DoF, i.e. surge).
Comparing the results from the two setups also proved to increase the effectiveness and understanding of the hydrodynamic loads. Therefore, these challenging measurements provided unique validation data, and valuable insights from post-processing yielded improved guidelines for future model test programs.
[1] with co-funding from the CRNavies consortium
Validation of wave drift forces
As stated before, MANWAV is based on the ‘two-time scales approach’: the low-frequent motions result from the manoeuvring forces, wave drift forces, and forces from controlled propellers and rudders. The wave-frequent motions are computed along the (low-frequent) track and heading, using the linear transfer functions from a frequency domain seakeeping program such as CRS SEACAL.
While most implementations of the ‘two-time scales approach’ consider only the mean wave drift forces, MANWAV also computes the time-varying wave drift forces. Additionally, MANWAV interpolates on the frequency domain wave drift forces with the actual speed and heading for all modes, thus ensuring consistency with the linear frequency domain computations. Therefore, the quality of the MANWAV results is strongly dependent on the quality of the frequency domain tool.
Redevelopment of MANWAV
MANWAV is based on a ‘3+1 degrees of freedom’ model, with coupled surge/sway/yaw and decoupled roll. In MANWAV, the motions are thought of as a superposition of the motion responses to manoeuvring and second order wave (drift) forces, and first order wave forces.
As the program has been developed over a number of CRS projects, this has resulted in monolithic MATLAB prototype implementation which has prevented CRS members from using MANWAV sub-models on their own simulation platforms. This has also hampered maintenance, cooperation between CRS members on time domain simulations, and implementation of knowledge from other CRS projects.





linkedin.com/company/
cooperative-research-ships
https://crships.org
A pilot project on co-simulation demonstrated that the Functional Mock-up Interface/Unit (FMI/FMU) standard provides a way out: MAMBO has adopted this approach by redesigning MANWAV as a plant-controller system, separating the vessel-propeller-rudder dynamics from the manoeuvre controls. The restructured MATLAB functions were ‘wrapped’ into Simulink models, which were converted into FMUs.
Members with access to an FMU-compliant simulation platform (such as Simulink or MARIN’s XMF) can now draw from this FMU set or use the integrated MANWAV-FMU vessel dynamics model. A demonstration of the consistency of the results between the starting MATLAB code and the newly developed Simulink models and FMUs is given in Figure 1.
June 2025, no. 144
More info
CRS – 55 years old and still flourishing!, MARIN Report magazine 143
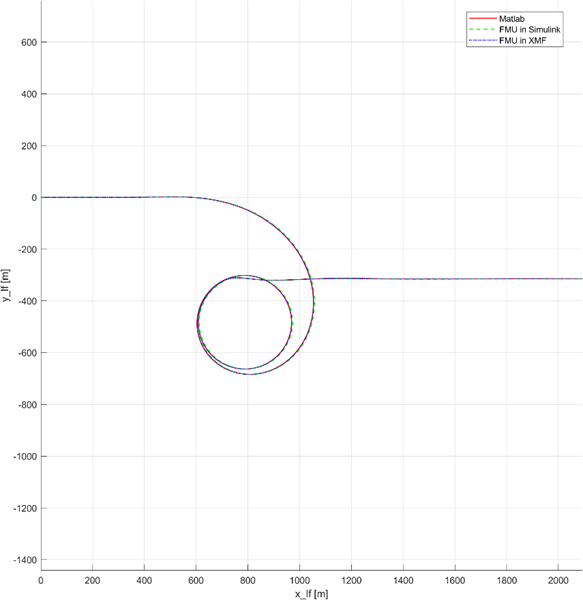
Figure 1: Turning circle - comparison of tracks obtained with MANWAV-MATLAB and MANWAV-FMU in Simulink and MARIN’s XMF simulation environments.
Understanding hydrodynamic loads
For validation of the Quadratic Transfer Functions of SEACAL, model tests[1] were carried out with the 5415M model with a soft spring setup and a semi-captive setup, as shown in Figures 2 and 3. These setups made it possible to measure wave drift forces in 6 Degrees of Freedom (DoF) in regular, biochromatic and irregular waves. This differs from most data available in literature: historically, model tests focused only on added resistance (so only in 1 DoF, i.e. surge).
Comparing the results from the two setups also proved to increase the effectiveness and understanding of the hydrodynamic loads. Therefore, these challenging measurements provided unique validation data, and valuable insights from post-processing yielded improved guidelines for future model test programs.
[1] with co-funding from the CRNavies consortium
Validation of wave drift forces
As stated before, MANWAV is based on the ‘two-time scales approach’: the low-frequent motions result from the manoeuvring forces, wave drift forces, and forces from controlled propellers and rudders. The wave-frequent motions are computed along the (low-frequent) track and heading, using the linear transfer functions from a frequency domain seakeeping program such as CRS SEACAL.
While most implementations of the ‘two-time scales approach’ consider only the mean wave drift forces, MANWAV also computes the time-varying wave drift forces. Additionally, MANWAV interpolates on the frequency domain wave drift forces with the actual speed and heading for all modes, thus ensuring consistency with the linear frequency domain computations. Therefore, the quality of the MANWAV results is strongly dependent on the quality of the frequency domain tool.
Ed van Daalen
Senior Researcher
Redevelopment of MANWAV
MANWAV is based on a ‘3+1 degrees of freedom’ model, with coupled surge/sway/yaw and decoupled roll. In MANWAV, the motions are thought of as a superposition of the motion responses to manoeuvring and second order wave (drift) forces, and first order wave forces.
As the program has been developed over a number of CRS projects, this has resulted in monolithic MATLAB prototype implementation which has prevented CRS members from using MANWAV sub-models on their own simulation platforms. This has also hampered maintenance, cooperation between CRS members on time domain simulations, and implementation of knowledge from other CRS projects.
As part of any assessment, time domain simulations are done to compute the ship motions during typical manoeuvres (such as heading keeping, turning circles, zigzags) in calm water and in waves.
The CRS MAMBO project aims to (re-)develop and validate the MANoeuvring in WAVes (MANWAV) software program, with a focus on software maintainability and sharing across simulation platforms, and the validation of wave drift forces by conducting dedicated model-scale experiments.
Requirements regarding minimum power, safe return to port, and navy recommendations, compel naval architects to assess the performance of ships sailing in harsh weather conditions or with limited propulsion and steering.
CRS MAMBO – Validated simulation tool for manoeuvring & seakeeping optimisation

Interested? Contact us to discuss your options
Report
Create a MARIN account to stay updated

Figure 2: Overview of the model and various sensors.
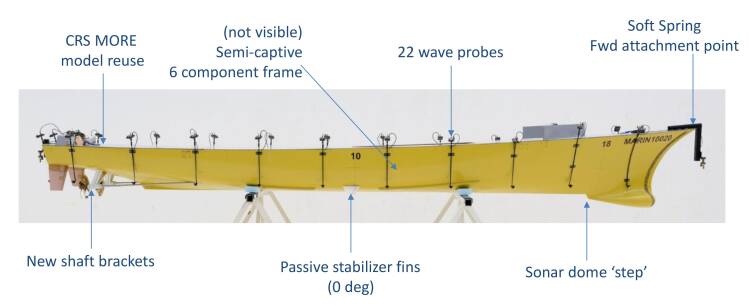

Figure 3: The two setups: soft mooring (top) with two forward springs attached to the hull; semi-captive (bottom) with a carbon double pantograph attached to a rolling plate inside the hull.


